Open Access
Open Access Abstract
The Ground Penetrating Radar can be effectively applied in ground surface exploration geophysics. Underground anomalies are shown in the ground penetratingradar slices in the form of signals having similarity in amplitude and phase. Typically, each point-scattering object can be seen as a form of hyperbola. During the Ground Penetrating Radar measurement in an urban environment, the data including information of high frequency electromagnetic waveforms were easily affected by civil noise (human activities, etc.). Shielded antennas could help to eliminate mostly the civil noise, but processing and analysis of the data were still difficult because of attenuation of electromagnetic waves and wave energy dispersion during their propagation in the ground environment. Due to the field geometry condition, 2D profiles were conducted. In order to analyze and interpret data effectively, we processed each 2D profile separately and located all the 2D profiles into the 3D dimensional space for enhancing the ability of illuminating potential 3D anomalies and confirming the reliability of the data interpretation. We studied the data measured at an industrial company at Nhon Trach district, Dong Nai province, Vietnam. Results from the data analysis of ground penetration radar reflected the object in three-dimensional space.
MỞ ĐẦU
Radar xuyên đất (Ground Penetrating Radar – GPR) là phương pháp sử dụng tín hiệu phản xạ hoặc tán xạ của sóng điện từ tần số cao từ 10MHz đến 4GHz để nghiên cứu những đối tượng dưới mặt đất. Phương pháp GPR có nhiều ưu điểm như : không phá hủy, tốc độ thu thập số liệu nhanh, độ chính xác cao. Cơ sở lý thuyết cho sự truyền sóng và phản xạ lại của sóng điện từ trong các môi trường đất đá được thể hiện qua hệ phương trình Maxwell. Các phương trình này mô tả sự biến đổi theo không gian và thời gian các tương tác giữa trường điện và trường từ cũng như mối liên hệ giữa chúng 1 . Sóng điện từ phát ra từ một anten phát dưới dạng xung, lan truyền trong vật chất, gặp các bất đồng nhất hoặc các mặt ranh giới giữa các môi trường có tính chất điện khác nhau thì một phần năng lượng sóng sẽ phản xạ/tán xạ trở lại mặt đất trong khi phần năng lượng còn lại tiếp tục di chuyển xuống phía dưới. Sóng quay ngược lại mặt đất được ghi nhận bởi anten thu và lưu trữ trong bộ nhớ của thiết bị để sử dụng cho việc xử lý và phân tích về sau. Công nghệ GPR được ứng dụng rộng rãi trong nhiều lĩnh vực: khảo sát công trình ngầm, khảo cổ, khảo sát các đới chứa nước, dự báo sạt lở, sụt lún… Một số thành tựu nghiên cứu có thể kể đến như sau:
+ Trong khảo sát công trình ngầm, nhiều tác giả đã sử dụng GPR để xác định cấu trúc vị trí của các đối tượng dị vật, như là, các đường ống nước, dây cáp, dây điện với vị trí và độ sâu được thông qua các biên độ tín hiệu phản xạ/ tán xạ mạnh sau khi xử lý lát cắt dữ liệu thô. Vào năm 2012, Bộ môn Vật lý Địa cầu – Trường Đại học Khoa học Tự nhiên, Đại học Quốc gia TP.HCM đã sử dụng thiết bị Detector Duo (Ý) trong việc khảo sát các công trình ngầm thuộc tuyến Metro 2- TP.HCM để xây dựng tàu điện ngầm 2 ; bản đồ công trình ngầm khu vực Hồ Hoàn Kiếm (Hà Nội) cũng đã được lập bằng phương pháp khảo sát GPR do Trung tâm Nghiên cứu và Ứng dụng Công nghệ Trắc địa Bản đồ phối hợp với Sở Khoa học Công nghệ Hà Nội thực hiện vào năm 2013 3 .
+ Trong nhiệm vụ khảo cổ, các di chỉ thành cổ hoặc các công trình cổ xưa có sự khác biệt về tính chất đất đá (vận tốc truyền sóng, độ dẫn điện,…) so với môi trường đất đá xung quanh. Sự khác biệt này là đặc điểm quan trọng để sử dụng phương pháp GPR trong nghiên cứu và tìm kiếm. Vào năm 2006, các nhà khoa học Ý đã tiến hành khảo sát và đã tìm thấy hầm mộ chứa hài cốt được cho là của Mona Lisa trong tác phẩm của họa sĩ thiên tài Leonardo de Vinci 4 . Bên cạnh đó, chúng tôi đã áp dụng phương pháp GPR trong công tác tìm mộ liệt sỹ tại tỉnh Quảng Nam (2013) và đạt được những kết quả đáng khích lệ khi khoanh vùng và định vị vị trí hố chôn tập thể của những người lính 5 .
+ Để khảo sát các đới chứa nước phục vụ nhiệm vụ quản lý và khai thác nguồn nước ngầm hiệu quả, phương pháp GPR được sử dụng khi thể hiện được sự khác biệt rất lớn của tín hiệu thu được của sóng GPR trong môi trường nước/đất đá xung quanh. Tại Pháp, M. Bano và R. Guerin 6 sử dụng thiết bị Pulse Ekko và Ramac để phát hiện và khoanh vùng nhiều hang đá vôi trên núi nhằm đánh giá được mức độ chứa nước trong các hang hốc.
+ Trong việc nghiên cứu và xác định các tổ mối, các hang rỗng trong thân đê, đập để góp phần dự báo sạt lở, sụt lún ở bờ sông Tiền có sử dụng ứng dụng GPR 7 , 8 . Trước đó, Viện hàn lâm Khoa học Công nghệ Việt Nam cũng đã áp dụng phương pháp GPR trong việc kiểm tra hiện trạng đê, đập trên khu vực miền Bắc nước ta và phát hiện ra nhiều tổ mối cũng như hang rỗng rất nguy hiểm 8 .
Trong nghiên cứu này, chúng tôi sử dụng phương pháp GPR để xác định dị vật ngầm trong môi trường đô thị thông qua việc thực hiện các bước xử lý và minh giải số liệu đo đạc thực địa 9 . Quá trình phân tích dữ liệu bao gồm hai giai đoạn: (i) xử lý số liệu thô bằng phần mềm Reflexw 10 (hiển thị hai chiều – 2D ); (ii) dùng phần mềm chuyên dụng OpendTect 11 để biểu diễn và minh giải các dữ liệu đã xử lý của tuyến đo 2D trong không gian 3D. Các hình ảnh lát cắt trên các tuyến đo 2D được biểu diễn dưới dạng 3D làm tăng khả năng biểu hiện các đối tượng dị vật 3D một cách hiệu quả. Việc biểu diễn rời rạc từng tuyến 2D mà không tính đến sự định vị không gian của chúng sẽ gây ra một số khó khăn nhất định trong nhận diện các dị vật (được ghi nhận bởi từng tuyến). Biểu diễn 3D giúp cho việc định hình và liên kết vị trí của các dị vật một cách cụ thể, điều này là mặt tồn tại trong minh giải các tuyến 2D.
PHƯƠNG PHÁP NGHIÊN CỨU
Phương pháp đo đạc trong thực tế
Khu vực khảo sát là một vùng đất đã bị san lấp, có diện tích khoảng 18m x 20m nằm trong một nhà máy sản xuất ở huyện Nhơn Trạch, tỉnh Đồng Nai ( Figure 1 ). Mục tiêu là xác định các đối tượng dị vật ngầm (nông) trong khu vực khảo sát (có thể là các đường ống, các miếng bê tông...) một cách tốt nhất có thể bằng phương pháp GPR.
Figure 1 . Vị trí tổng quan khu vực nghiên cứu của huyện Nhơn Trạch tỉnh Đồng Nai (a); hình ảnh công ty sản xuất công nghiệp (b) 12 ; vị trí các tuyến đo 2D (c).

Theo kế hoạch khảo sát, có 17 tuyến đo được vạch ra. Các tuyến đo dự kiến là những đường thẳng song song, cách đều nhau khoảng 1m. Địa hình đo đạc gồ ghề gây ra một số khó khăn nhất định khi thu thập số liệu.
Kiểu thu thập dữ liệu là đo đạc khoảng cách chung (Common Offset: CO).Trong kiểu thu thập này thì anten thu di chuyển đồng thời với anten phát trên mặt đất, sao cho khoảng cách giữa chúng là không đổi ( Figure 2 a). Thiết bị được sử dụng ( Figure 2 b) là máy Detector Duo của hãng IDS, Italia sản xuất 13 , 14 , sử dụng một anten tần số kép: tần số 700MHz và 250 MHz, cho phép xác định đồng thời dị vật ở nông và sâu tại cùng thời điểm. Ở đây, chúng tôi sử dụng dữ liệu ở tần số 700 MHz cho việc phát hiện các dị vật ở tầng nông trong khoảng độ sâu 2 m.

Phương pháp xử lý số liệu
Sau khi thu thập dữ liệu radar xuyên đất, chúng tôi dùng phần mềm Reflexw để xử lý. Reflexw được viết bằng Turbo Pascal 5.5 với cấu trúc dạng module chuẩn, độc lập nhau và tương thích với hầu hết các loại thiết bị Georadar 10 . Sau đó tiến hành truy cập vào dữ liệu cần xử lý, từ mặt cắt GPR ban đầu ( Figure 3 a), tiến hành xử lý dữ liệu thô theo các bước sau 9 , 10 :
+ Bước 1: Thực hiện hiệu chỉnh giá trị thời gian tín hiệu đầu tiên xuất hiện, giúp loại bỏ được thời gian sóng truyền từ anten đến mặt đất bằng công cụ move starttime ( Figure 3 b).

+ Bước 2: Thực hiện với các bộ lọc nhiễu 1D, 2D ta lần lượt loại khử được các loại nhiễu có trong mặt cắt GPR bằng các bộ lọc sau ( Figure 4 a):
Subtract-mean : loại các nhiễu không đổi xuất hiện trong mặt cắt GPR.
Subtract-DC-shift: lọc nhiễu gián đoạn xuất hiện trong mặt cắt GPR.
Bandpassbutterworth: lọc thông dải trong khoảng từ tần số thấp đến tần số cao khi sử dụng hàm sin để cắt cụt.
Background removal: loại bỏ nhiễu nền và nhiễu nằm ngang.
+ Bước 3: khuếch đại tín hiệu để bù lại sự mất mát tín hiệu và sự giảm biên độ của sóng bằng công cụ gain function ( Figure 4 b).

Dưới đây là một thí dụ về các tham số của các bước lọc nhiễu của tuyến T8 được mô tả trong Table 1 .
| Công cụ xử lý | Thông số | Ý nghĩa |
| Move starttime | -7,22 | Loại bỏ thời gian sóng truyền từ an ten xuống mặt đất 7,22 ns |
| Subtract-mean | 1,4 | Lọc các nhiễu khác tần số 700MHz với T=1/f =1,4 ns |
| Subtract-DC-shift | 120 | Lọc các nhiễu không đổi từ mặt đất đến độ sâu 120 ns |
| Bandpassbutterworth | 250/1200 | Lọc thông dải trong khoảng nhỏ hơn hoặc bằng ½ tần số 700 MHz đến cao hơn hoặc bằng 3/2 tần số 700 MHz |
| Background removal | 120 | Loại bỏ nhiễu nền và nhiễu nằm ngang từ mặt đất đến độ sâu 120 ns |
| Gain function | 0,99/6,72 | Hệ số khuếch đại tuyến tính/hệ số khuếch đại hàm mũ |
Sau khi xử lý dữ liệu của các tuyến 2D trong Reflexw, các dữ liệu đã xử lý này được định vị tọa độ đo đạc để biểu diễn 3D trong phần mềm OpendTect.
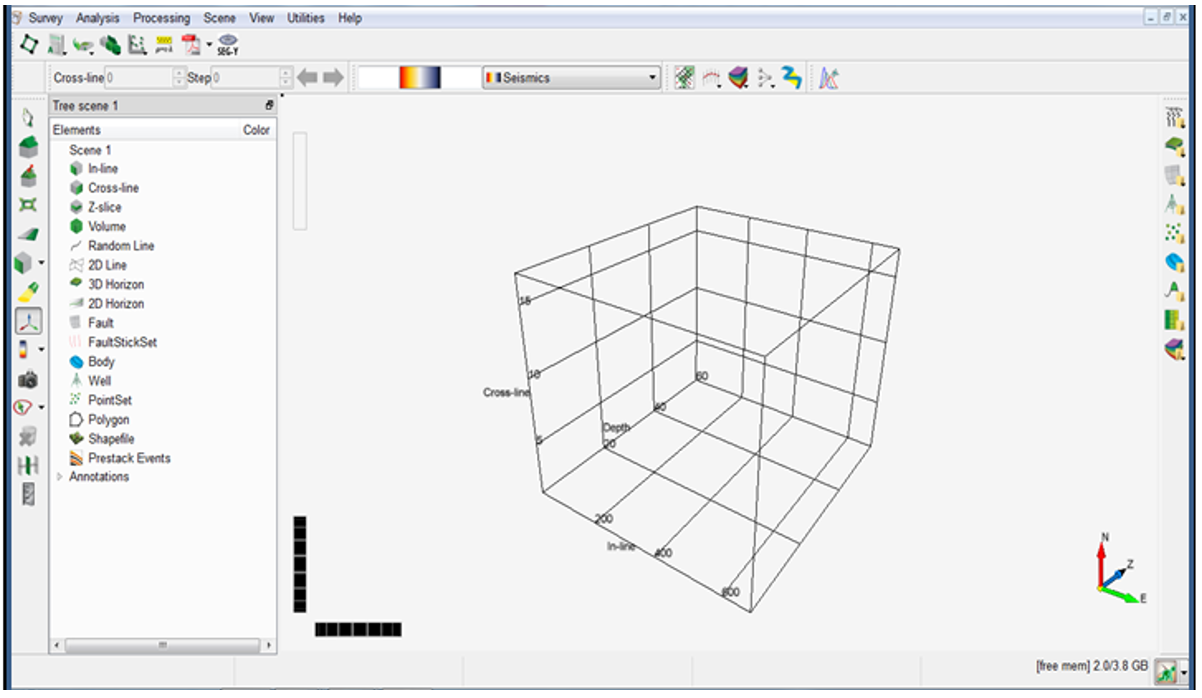
OpendTect là phần mềm mã nguồn mở rất tốt trong việc xử lý / minh giải dữ liệu Địa Vật lý (như là địa chấn). Chúng tôi áp dụng phần mềm này để xử lý và minh giải các dữ liệu đo đạc GPR tại vị trí khảo sát này. Hình ảnh 3D trong phần mềm này xuất hiện dưới dạng ba trục : Inline, Crossline, Zline (Depth) như trong Figure 5 . Các tọa độ trong phần mềm này được chuyển đổi thích hợp từ các trục tọa độ Đề các XYZ.
Minh giải dữ liệu
Từ dữ liệu của phần mềm Reflexw đưa vào, tiến hành xây dựng các lát cắt theo từng tuyến (trục Crossline). Mỗi tuyến cách nhau 1m. Hình ảnh lát cắt các tuyến 3D được chúng tôi thể hiện trong Figure 6 .
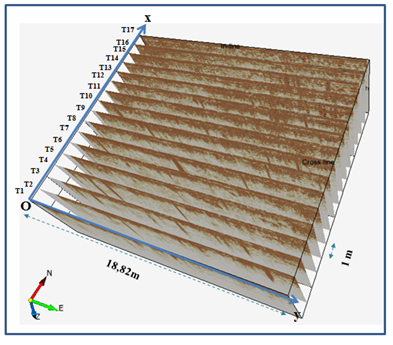
Trên trục In-line, chiều dài trục là 18,82m được chia đều làm 677 điểm. Khoảng cách giữa 2 điểm liên tiếp trên trục này là 0,0278m tương ứng với khoảng cách giữa hai đường ghi sóng GPR liền kề.
Đối với trục Zline(ns) thể hiện độ sâu của vật. Nếu vận tốc sóng truyền trong môi trường 1 là 0,1 (m/ns) thì độ sâu vật được tính như sau: d(m) = [tọa độ (Z-line)*0,1]/2.
Tiến hành khảo sát trên lát cắt của từng tuyến và liên kết các đối tượng dị vật nằm ở các tuyến lại, chúng tôi sẽ có kết quả xử lý sẽ được nói đến trong mục kết quả.
KẾT QUẢ
Sau khi đã hoàn thành công việc xử lý dữ liệu thô trên toàn bộ các tuyến trong Reflexw, tiến hành xuất dữ liệu ra dưới định dạng ASCII để chuyển sang OpendTect tiếp tục biểu diễn dữ liệu trong không gian 3D và tiến hành minh giải. Đây là phần quan trọng nhất của nghiên cứu, đòi hỏi người phân tích phải quan sát hết sức tỉ mỉ các tuyến và sự liên hệ của các đối tượng ngầm được phát hiện. Chú ý rằng: các dị vật ngầm riêng lẻ (như vị trí cắt ngang bởi tuyến đo GPR và tuyến dây điện, hố sụt, mảng bê tông) được xem như là các tán xạ điểm phản ánh hình dạng hyperbol hoặc là tín hiệu phản xạ mạnh trong giản đồ GPR. Bên cạnh đó, các cấu trúc địa chất (ranh giới địa chất, hang karst …) cũng có thể phản ánh bởi các ranh giới tín hiệu mạnh trên giản đồ GPR. Chúng tôi khảo sát một số trường hợp cụ thể của một số tuyến xuất hiện dị vật để làm cơ sở tương tự cho việc xử lý và minh giải các tuyến còn lại. Kết quả đã xác định được một số dị vật ngầm kéo dài (DV1, DV2, DV3, DV4, DV5) có thể là đường ống hoặc đường dây cáp và một số dị vật riêng lẻ (DV6, DV7, DV8, DV9, DV10) (xem Table 1 ). Các dữ liệu GPR được trích xuất tại các vị trí mà dị vật ngầm xuất hiện được minh giải cụ thể trong từng trường hợp dị vật cụ thể dưới đây.
Dị vật 1 (DV1)
Trong quá trình phân tích các mặt cắt, nhận thấy từ tuyến T12 đến tuyến T16 xuất hiện một dị vật với tín hiệu sóng phản xạ liên tục trên bề mặt khu vực, dự đoán đây có thể là tín hiệu của một lớp bê tông. Hình ảnh mặt cắt DV1 được chúng tôi thể hiện trong Figure 7 .

Lớp bê tông này xuất hiện ngay từ đầu tuyến T12 đến T16 với vị trí được xác định trên mỗi tuyến đo từ 15,15 m đến 17,62 m, tín hiệu phản xạ nhận được vào khoảng 10ns => độ sâu lớp bê tông này khoảng 0,5 m. Chi tiết vị trí của dị vật 1 theo từng tuyến được mô tả trong Table 2 .
Dị vật 2 (DV2)
Dị vật 2 có tín hiệu kéo dài từ tuyến T3 đến tuyến T11 có thể là một đường ống kéo dài, cách đầu mỗi tuyến đo khoảng từ 16,42 m đế n 17,46 m ; thời gian tín hiệu phản xạ trên các tuyến khoảng chừng 9 ns độ sâu dị vật là 0,45m. Đặc điểm nhận dạng của DV2 trên các tuyến này chính là tín hiệu xuất hiện trên các tuyến giống nhau về hình dạng, biên độ và độ sâu. Trong Figure 8 , hình ảnh mặt cắt DV2 được thể hiện rõ nét.
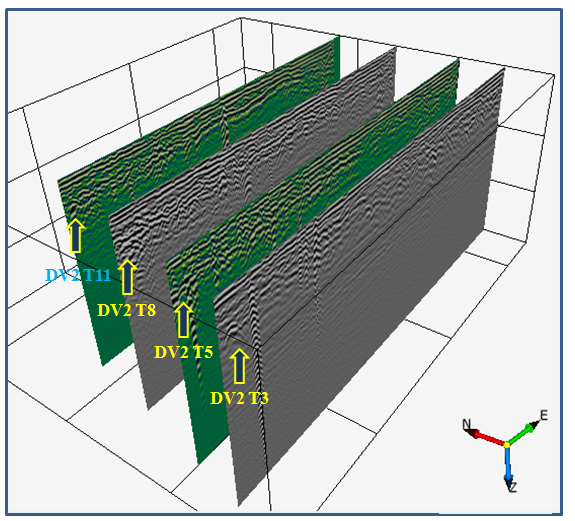
Tuy nhiên, trong khi xử lý số liệu, hai tuyến T4 và T7 không ghi nhận sự xuất hiện của dị vật DV2 này. Liên kết các tuyến lại dự đoán được đường đi của DV2 đã cắt ngang các tuyến T4,T7. Thống kê chi tiết vị trí xuất hiện theo từng tuyến của DV2 được mô tả chung trong Table 2 .
Dị vật 3 (DV3)
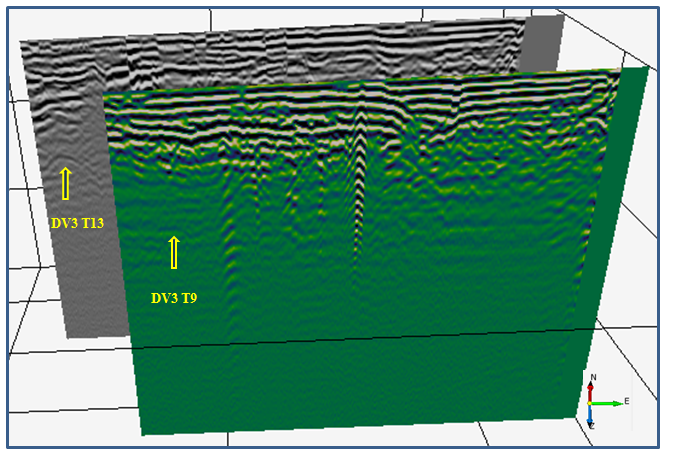
Dị vật 3 có tín hiệu kéo dài từ tuyến T9 đến tuyến T13 có thể là một đường ống hoặc cáp kéo dài, cách đầu mỗi tuyến đo khoảng từ 11,32 m đến 15,92 m; thời gian tín hiệu phản xạ trên các tuyến 10 ns độ sâu dị vật khoảng 0,5 m (với vận tốc truyền sóng ước tính 0,1m/ns). Tuy nhiên, trong khi thu thập số liệu, dị vật DV3 có thể hiện trên các tuyến T10, T11 nhưng không rõ lắm. Liên kết các tuyến lại dự đoán được đường đi của DV3 cắt ngang các tuyến T10 và T11. Như vậy, hình ảnh mô tả vị trí DV3 được thể hiện rõ nét nhất trong Figure 9 với các tuyến T9, T13. Các thống kê chi tiết vị trí xuất hiện theo từng tuyến của DV3 thu được mô tả chung trong Table 2 .
Dị vật 4 (DV4)
Dị vật 4 có tín hiệu kéo dài từ tuyến T6 đến tuyến T8 có thể là một đường ống kéo dài, cách đầu mỗi tuyến đo T6 (y = 8,34 m), T7(y = 9,62 m), T8(y = 10,7 m); thời gian tín hiệu phản xạ trên các tuyến khoảng chừng 9 ns độ sâu dị vật là 0,45 m. Tuy nhiên, trên tuyến T8 thì tín hiệu xuất hiện rất yếu. DV4 có dạng là hyperbol tán xạ dù tín hiệu nhỏ nhưng với sự biểu diễn bằng hai phổ màu biên độ khác nhau (màu đen trắng (tuyến T6) và xanh đen (tuyến T7) thì hình ảnh DV4 vẫn có thể phát hiện được (xem vị trí mũi tên trên Figure 10 ). Thống kê chi tiết vị trí xuất hiện theo từng tuyến của DV4 được mô tả chung trong Table 2 .

Dị vật 5 (DV5)
Dị vật 5 có tín hiệu kéo dài từ tuyến T6 đến tuyến T8 có thể là một đường ống hoặc dây cáp kéo dài, cách đầu mỗi tuyến đo T6 (y = 3,2 m), T7(y = 4,2 m), T8(y = 5,2 m) ; thời gian tín hiệu phản xạ trên các tuyến khoảng chừng 10ns độ sâu dị vật là 0,5 m. Dị vật DV5 được ghi nhận là một hyperbol tán xạ được thể hiện khá rõ ràng trên tuyến T7 và T8, nhưng chỉ là tín hiệu mạnh nhất trong tuyến T6 ( Figure 11 ).

Các dị vật riêng lẻ (DV6, DV7, DV8, DV9, DV10)
Các dị vật có khả năng là những đối tượng có kích thước nhỏ, nằm riêng lẻ như DV6, DV7, DV8, DV9 và DV10 được thể hiện rõ trong các mặt cắt 2D của từng tuyến. Ở đây, chúng tôi trình bày lát cắt của tuyến T17, trên tuyến này xuất hiện DV10 ( Figure 12 ).
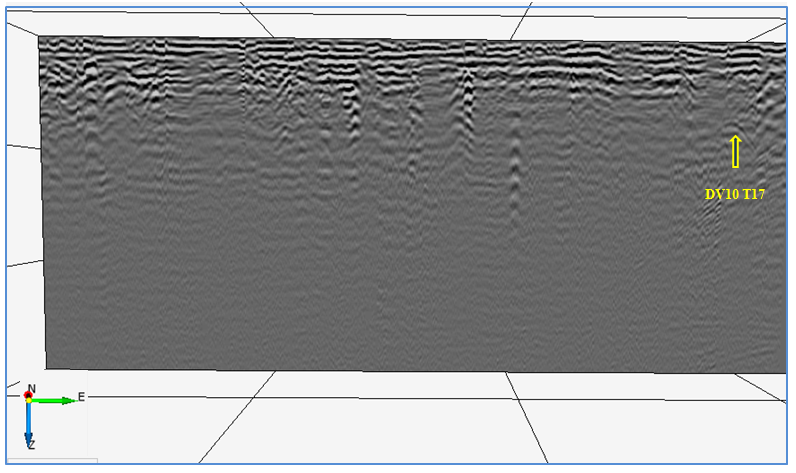
Vị trí của DV10 cách đầu tuyến đo 2,39m ; thời gian tín hiệu phản xạ là 14 ns độ sâu dị vật là 0,7 m.
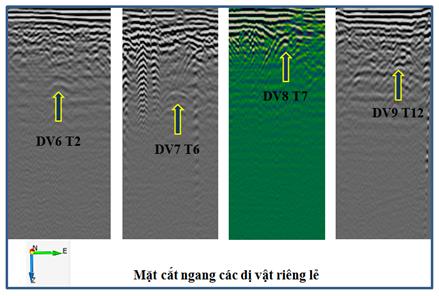
Các dị vật còn lại (DV6, DV7, DV8, DV9) chỉ được trình bày mặt cắt ngang của một phần các tuyến có dị vật xuất hiện. Đa số các dị vật này đều có kích thước nhỏ, độ sâu nông (từ 0,46 m đến 1 m) với thống kê chi tiết vị trí xuất hiện vàđộ sâu theo từng tuyến sẽ được mô tả chung trong Table 2 và Figure 13 .
Tổng quát kết quả
Sau khi tiến hành xử lý và minh giải trên toàn bộ khu vực khảo sát, kết luận tổng quát như sau: khu vực có tổng cộng 17 tuyến đo, khoảng cách tuyến 1 mét. Với anten tần số cao 700 MHz, độ sâu khảo sát đạt cao nhất đến 2 mét. Tại khu vực này, 10 dị thường được phát hiện với vị trí được thống kê trong Table 2 .
| Tên dị vật | Tuyến nhận thấy | Z-line(ns) | x (m) | y(m) | Độ sâu d(m) |
| DV1 | T12 | 10 | 12 | 17,62 | 0,5 |
| T13 | 10 | 13 | 17,42 | 0,5 | |
| T14 | 10 | 14 | 17,02 | 0,5 | |
| T15 | 10 | 15 | 15,15 | 0,5 | |
| T16 | 10 | 16 | 17,12 | 0,5 | |
| DV2 | T3 | 9 | 3 | 17,46 | 0,45 |
| T5 | 9 | 5 | 17,25 | 0,45 | |
| T6 | 9 | 6 | 17,32 | 0,45 | |
| T8;T9;T10;T11 | 9 | 8;9;10;11 | 16,42 | 0,45 | |
| DV3 | T9 | 18 | 9 | 15,92 | 0,9 |
| T11 | 18 | 11 | 13,72 | 0,9 | |
| T12 | 18 | 12 | 12,82 | 0,9 | |
| T13 | 18 | 13 | 11,32 | 0,9 | |
| DV4 | T6 | 20 | 6 | 8,34 | 1 |
| T7 | 20 | 7 | 9,62 | 1 | |
| T8 | 20 | 8 | 10,7 | 1 | |
| DV5 | T6 | 10 | 6 | 3,2 | 0,5 |
| T7 | 10 | 7 | 4,2 | 0,5 | |
| T8 | 10 | 8 | 5,2 | 0,5 | |
| DV6 | T2 | 18 | 2 | 3,52 | 0,9 |
| DV7 | T6 | 20 | 6 | 12,9 | 1 |
| DV8 | T7 | 9,2 | 7 | 6,62 | 0,46 |
| DV9 | T12 | 18 | 12 | 1,72 | 0,9 |
| DV10 | T17 | 14 | 17 | 2,39 | 0,7 |
Từ thống kê Table 2 , đưa ra được vị trí dị vật của toàn bộ các tuyến đo theo diện mặt Oxy ( Figure 14 ).

Trước đây, khu vực này đã được khảo sát bằng phương pháp EM 15 , bản đồ diện mặt khu vực khảo sát được thể hiện trên Figure 14 .
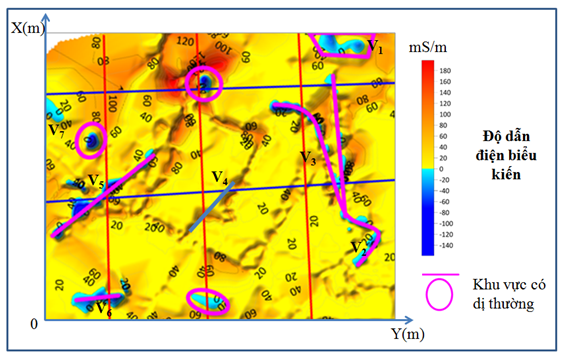
Đối chiếu hai bản đồ diện mặt ( Figure 14 , Figure 15 ), cho thấy có sự trùng hợp minh giải giữa kết quả của hai phương pháp ( Figure 16 ). Các kết quả minh giải từ phương pháp GPR được biểu diễn chồng lặp lên lát cắt độ dẫn điện biểu kiến từ phương pháp EM ( Figure 16 ).
• Vùng DV1 của GPR bao phủ toàn bộ V1 của EM ở cùng vị trí.
• DV2, DV3, DV4, DV5 của GPR có vị trí trùng khớp với vị trí của V2, V3, V4, V5 của kết quả phương pháp EM.
• DV6, DV10 là những dị vật riêng lẻ, cũng có vị trí trùng hợp V6, V7 của phương pháp EM.

THẢO LUẬN
Khi xử lý dữ liệu thô bằng phần mềm Reflexw đòi hỏi phải tuân thủ chặt chẽ quy trình xử lý nhằm đưa ra kết quả tốt nhất. Các thông số về lọc nhiễu, khuếch đại theo từng tuyến GPR có giá trị khác nhau sao cho phù hợp với đặc điểm tín hiệu phản xạ ở từng tuyến GPR khảo sát. Phân tích dữ liệu Địa Vật lý là công việc đòi hỏi sự tỉ mỉ, kiến thức về địa chất ở từng khu vực nghiên cứu. Khi đo đạc thực hiện theo các tuyến 2D các dữ liệu đòi hỏi người nghiên cứu phải liên kết được các tuyến đo trên toàn bộ khu vực khảo sát. Do đó, việc phân tích dữ liệu 2D trong không gian 3D đem lại một số hiệu quả sau: i ) Biểu diễn được toàn bộ các mặt cắt 2D trong khu vực khảo sát theo các tuyến, giúp người minh giải dể dàng có sự liên kết các đối tượng ngầm có đặc điểm tương tự nhau ở các tuyến ; ii ) Tọa độ vị trí của dị vật thể hiện rõ trên không gian 3D giúp người minh giải dễ dàng nhận định nhanh vị trí, đặc điểm của đối tượng. Điều này thì trong không gian 2D sẽ rất khó khăn; iii ) Sự thể hiện càng rõ về đặc điểm của đối tượng trong không gian 3D biểu diễn dưới sự tương phản về màu sắc của các mặt cắt GPR sẽ giúp cho việc minh giải đối tượng chính xác, rõ ràng hơn. Đây là yếu tố quan trọng nhất của nghiên cứu này.
Trong khu vực nghiên cứu này, phương pháp EM cũng được áp dụng nên chúng tôi đã đối chứng hai kết quả khảo sát GPR và EM. Điều dễ nhận thấy là các tín hiệu của GPR và EM nhận được từ đối tượng nghiên cứu khá tương đồng. Tuy nhiên, có một số dị vật mà tín hiệu GPR rõ nét nhưng không thể hiện ở EM vì dị vật không có sự khác biệt lớn về độ dẫn điện so với môi trường, ngoài ra còn do độ phân giải của phương pháp. Bởi vì phương pháp EM không đạt hiệu quả cao khi môi trường nói trên có độ dẫn điện nhỏ. Điều này giúp cho các nhà nghiên cứu có thêm kinh nghiệm khi lựa chọn phương pháp phù hợp để khảo sát đối tượng ngầm.
KẾT LUẬN
Phương pháp GPR đã phát huy tính hiệu quả cao trong việc xác định các đối tượng ngầm, công trình ngầm. Nhờ vào sự phát triển của khoa học kỹ thuật, các thiết bị đo GPR ngày càng phát triển và hoàn thiện về khả năng thu phát tín hiệu điện từ và tiện lợi trong thi công đo đạc. Việc sử dụng các phần mềm chuyên dụng trong xử lý và minh giải (chương trình Reflexw và OpendTect) đem đến sự hiệu quả cao khi phân tích số liệu điện từ tần số cao này. Người thực hiện việc xử lý rất dễ dàng minh giải, liên kết các đối tượng ngầm trong toàn bộ khu vực khảo sát khi định vị các tuyến đo 2D trong không gian 3D và sử dụng các bảng màu sắc tương phản để làm nổi bật các đối tượng nghiên cứu. Ngoài ra, việc kết hợp hai phương pháp GPR và EM tại cùng một địa điểm khảo sát là phương pháp hiệu quả để làm tăng độ chính xác trong xác định các đối tượng dị vật, giúp giải quyết bài toán thăm dò đối tượng ngầm ở tầng nông.
DANH MỤC CÁC CHỮ VIẾT TẮT
GPR : Ground Penetrating Radar
CO : Common Offset
DV : Dị vật
EM : Electromagnetic
XUNG ĐỘT LỢI ÍCH
Tác giả khẳng định không có bất cứ xung đột lợi ích nào.
ĐÓNG GÓP CỦA CÁC TÁC GIẢ
Tác giả Đặng Hoàng Duy và Lê Văn Anh Cường có vai trò như nhau trong bài báo khi đóng góp trực tiếp đến xử lý số liệu, giải thích kết quả và viết bản thảo. Chương trình chuyển đổi định dạng số liệu giữa các phần mềm xử lý chuyên dụng Địa Vật lý được viết bởi Lê Văn Anh Cường. Đặng Hoài Trung và Nguyễn Thành Vấn đóng góp quan trọng trong đo đạc và phân tích số liệu trong bản thảo.
LỜI CẢM ƠN
Nghiên cứu này được tài trợ kinh phí bởi Đại học Quốc gia Thành phố Hồ Chí Minh (ĐHQG-HCM) trong khuôn khổ đề tài mã số C2019-18-08. Chúng tôi xin gửi lời cảm ơn đến ông Dương Bá Mẫn đã cung cấp một số dữ liệu đo đạc. Tập thể tác giả xin chân thành cảm ơn các đồng nghiệp trong Bộ môn Vật lý Địa cầu, Trường Đại học Khoa học Tự nhiên, ĐHQG-HCM.
References
- Vấn N T. Phương pháp dịch chuyển và phần mềm xử lý dữ liệu radar xuyên đất. . 2017;:. Google Scholar
- Vấn N T, Cường L V A, Trung Đ H, Triết V M. Xây dựng quy trình vận hành thiết bị, thu thập, xử lý, minh giải số liệu radar xuyên đất để xác định các hố ngầm và công trình ngầm tại TP.HCM. Đề tài Sở Khoa học và Công nghệ TP.HCM. 2011;:. Google Scholar
- Giảng N. Một số kết quả nghiên cứu đánh giá hiện trạng địa chất môi trường ở hồ Hoàn Kiếm. Hà Nội, Tạp chí Địa chất. 2002;N.269:26-34. Google Scholar
- Chris J J, Bristow C. GPR studies in the Piano di Pezza area of the Ovindoli-Pezza fault, central Apennines, Italy. Near Surface Geophysics. 2006;:147-153. Google Scholar
- Lữ P H. Tìm hài cốt liệt sĩ bằng radar. . 2015;:. Google Scholar
- Bano M, Loeffler O. GPR measurements in a controlled Vadose Zone: Influence of the water content. Vadose Zone Journal, Soil Science Society of America. 2004;:1-11. Google Scholar
- Lê N. T., Nguyễn V.G.. Góp phần xác định nguyên nhân sạt lở bờ sông Tiền và sông Sài Gòn bằng các khảo sát địa vật lý gần mặt đất. Tạp chí Các Khoa học về Trái đất. 2012;(34):205-216. Google Scholar
- Nguyễn Văn Giảng và nnk.Nghiên cứu đánh giá hiện trạng đê đập trên miền Bắc Việt Nam bằng phương pháp radar xuyên đất và các phương pháp địa vật lý khác. . 1998;:. Google Scholar
- Nguyen T. International Conference on Geo-Spatial Technologies and Earth Resources. . ;:34-51. Google Scholar
- Sandmeier geophysical research.Reflexw - GPR and Seismic processing software. . 2019;:. Google Scholar
- Bruin G d. Use of OpendTect. . 2015;:. Google Scholar
- Microsoft.Ảnh địa lý của huyện Nhơn Trạch, tỉnh Đồng Nai, Việt Nam. . 2019;:. Google Scholar
- Georadar I D S. máy đo GPR IDS Duo Detector. . 2019;:. Google Scholar
- Bộ môn Vật lý Địa cầu Đại học Khoa học Tự nhiên TP. HCM- Việt Nam.Đại học Khoa học Tự nhiên TP. Hồ Chí Minh. . 2013;:. Google Scholar
- P Sharma.. Environmental and Engineering Geophysics. . 1997;:. Google Scholar